1. 1 kg of Uranium can produce energy as much as:
- 20 kg coal
- 200 kg coal
- 5000 kg coal
- 10000 kg coal
Correct answer: 4
Source: https://www.euronuclear.org/info/encyclopedia/f/fuelcomparison.htm
2. Fission reaction takes place in:
- Turbine
- Reactor
- Heat exchanger
- Alternator
Correct answer: 2
3. The correct statement about a standalone nuclear reactor supplying power to varying loads:
- It is most efficient of all plants
- It is slightly less efficient than a coal-fired power plant
- It is inefficient
- None of the above
Correct answer: 3
A nuclear reactor can’t efficiently respond to load fluctuation an is thus inefficient for varying load condition
4. Nuclear fuel can stay in reactor for as long as:
- 5 hours only
- 5 weeks
- 5 months
- 5 years
Correct answer: 4
5. Number of atoms in 5 kg of U235 fuel is:
- 2.35 * 226
- 1.28 * 1025
- 2.56 * 999
- 2200 * 999
Correct answer: 2
Number of atoms = 5 kg / 235 * 6.023 * 1026
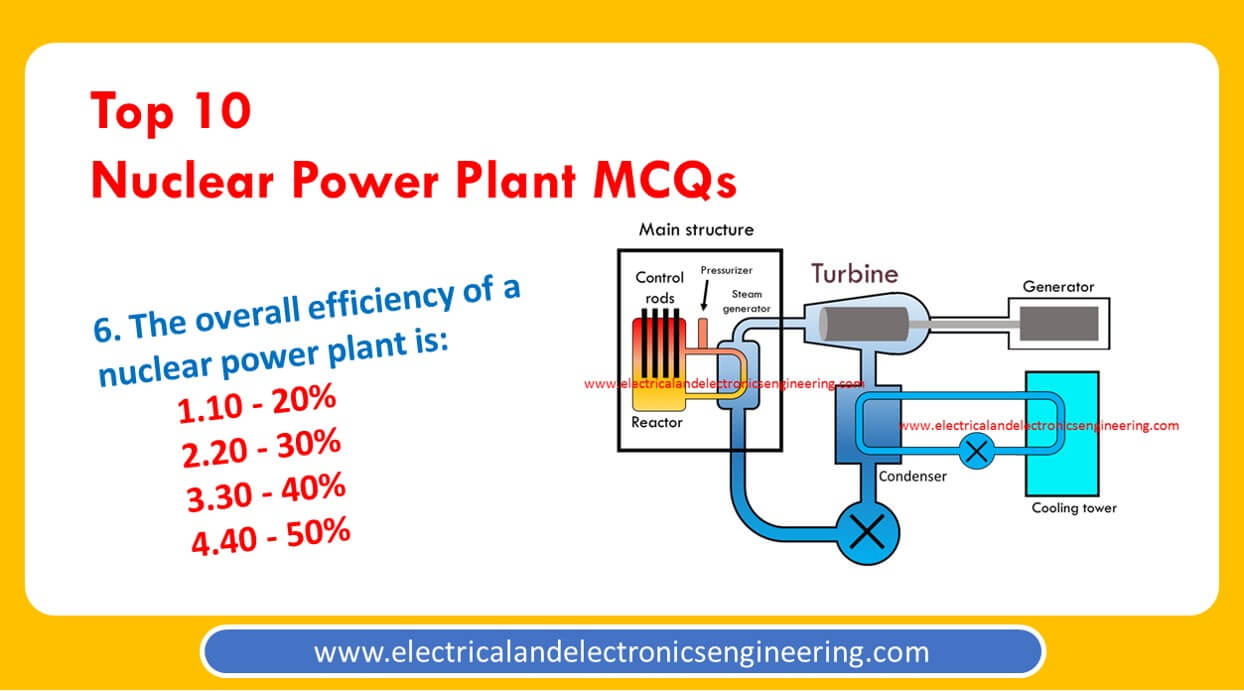
6. The overall efficiency of a nuclear power plant is:
- 10 – 20%
- 20 – 30%
- 30 – 40%
- 40 – 50%
Correct answer: 3
7. Type of turbine used in a nuclear power plant:
- Hydro
- Steam
- Gas
- None of above
Correct answer: 2. Steam
8. The most popular type of moderator used in nuclear power plants:
- Light water
- Heavy water
- Graphite
- None of above
Correct answer: 1
9. Water temperature and pressure in steam generator vessel should be less than reactor coolant temperature and pressure.
Above statement is:
- Completely correct
- Completely wrong
- Correct about temperature only
- Correct about pressure only
Correct answer: 1
10. NRC stands for:
- Nuclear regulatory commission
- Nuclear recycling control
- Nuclear record
- Nuclear recurring charge
Correct answer: 1